頭をすりすり寄せてくる猫ちゃんは、一部嫌いな人もいるが、古今東西、老若男女問わず大抵の人に癒しを感じさせる。筑波大学システム情報系の田中文英教授ら研究グループは、〝猫のように頭を摺り寄せてくるロボット〟を開発し、癒し効果を検証した。人の緊張が緩和される可能性があることが示唆されたという。
 手触りの良さや温かみなどを提供し、人に癒しを与えるセラピーロボットが多数開発されており、これらのセラピーロボットは、主に安全性の観点などから、人からロボットへの接触行動が前提としている。一方で、ロボットから人への接触行動は依然として研究段階にある。
手触りの良さや温かみなどを提供し、人に癒しを与えるセラピーロボットが多数開発されており、これらのセラピーロボットは、主に安全性の観点などから、人からロボットへの接触行動が前提としている。一方で、ロボットから人への接触行動は依然として研究段階にある。
猫科の動物が仲間に対して頭を摺り寄せる動作は、「bunting」と呼ばれ、愛着表現やマーキングと関わりがあると考えられている。しかし、こうしたbuntingのように、ユーザーに対してすり寄る動作が可能なセラピーロボットは、これまでほとんどなかった。
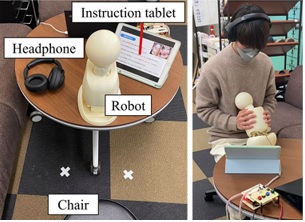
田中教授らの研究では、動物の頚髄構造にヒントを得た柔軟性を有するロボットの頚髄を開発。このシステムをもとに、猫のbunting動作を模した動きができるロボットを作り、その効果を22人の大学生・大学院生が参加した実験で確認した。気分の測定は、〝緊張〟や〝怒 り〟など六つのサブスケールで構成され、サブスケールごとに三つの質問項目が用意されている「TMS」質問紙を用いて行われた。
開発されたロボットの頚髄は主に四つの骨部品をジョイントで接続された構造をしており、部品間は複数のシリコンチューブとステンレス製のワイヤーで結合されている。このうちワイヤーは「頚髄の屈曲をもたらすもの」と「屈曲での剛性の強弱をもたらすもの」とに分かれ、それぞれ独立したサーバーモーターにより制御される。
研究では、①低剛性設定、②高剛性設定、③可変剛性設定の3種類の設定下でそれぞれbunting動作を体験してもらい、体験前後の気分を測定した。実験の結果、ロボットによるbunting動作を体験した後では、体験する前と比べて実験参加者の緊張値が有意に減少することが分かった。
現象の度合いは、可変剛性設定で最大であったものの、減少度合に条件間の有意差は認められなかった。
しかしながら、実験参加者の感想(自由記述)では、「剛性が変わると本物のように感じられ、最もリラックスできるように思えた」「強弱の違いが感じ取れて、より生命感があり自然に思えた」といったコメントが寄せられるなど、剛性変化の有望性が示唆された。
この研究で開発したロボットは、首動作に特化した極めてシンプルなもの。このため、実験は実験参加者のロボットの持ち方やロボットとの位置関係などを統制して行われた。buntingを統制の少ない全身自律動作のロボットに実装するには、ユーザーとの距離や接触時の力などをリアルタイムにセンシングしつつ動作に反映させる、高度な全身の制御が求められている。
研究チームでは、人と関わり、人に癒しや安心感を与えるロボットの開発を、今後も進める構えだ。






Copyright 株式会社官庁通信社 All Rights Reserved.