■ポイント□
〇適応学習機能を搭載した筋電制御型の義手システム
〇厚労省の補装具等完成用部品に登録され、公費支給により利用者に届けられる
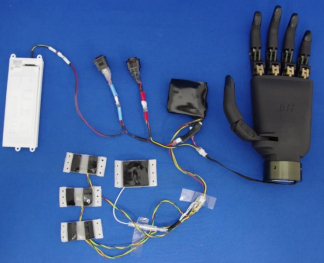
電気通信大学大学院情報理工学研究科の山野井佑介特任助教、矢吹佳子特任研究員、博士後期課程3年の黒田勇幹氏(横井研究室所属)は、5指独立駆動型のサイボーグ義手(生体信号を用いて制御されるロボットハンド)の開発と実用化に成功した。さらに、病院等でのフィールドテストをパスし、厚生労働省の補装具等完成用部品として認められた。このシステムは、個性適応学習(2)機能を搭載しており、利用者の筋電パターンと義手の手指運動パターンを後天的に対応づけることで、自在にコントロールすることができる。
これまでに国内で公費支給されてきた筋電義手は、海外の製品が主であり、輸入品であるためにコスト高であるとともに、機能的にも制限が大きく、自由に機能追加などの開発を行うことが困難だった。
山野井特任助教らは、人工知能とロボット技術を研究しており、そこでの研究成果の社会還元を目指した取り組みを行ってきた。今回完成用部品に登録されたサイボーグ義手は、取組の一例であり、電気通信大学が開発に成功した研究の集大成となる。
今回、義手システムを3名の被験者と3か所の病院と義肢装具会社の協力を得て、3か月間のフィールドテストを実施。主治医の診察として、日常生活において有効に機能し被験者の生活向上に寄与するとの評価結果を得た。
これらの評価結果に加え、組み立てマニュアルとプロトタイプを厚労省に提出し、完成用部品としての認定登録に至った。これまで電動義手で完成用部品に登録されているものは国外製大手3社のものと2018年に当研究グループが開発したもののみで、国産義手としては2例目となる。同システムは他社製には無い適応学習機能を搭載しており、より直感的に義手を動かすことができる。







Copyright 株式会社官庁通信社 All Rights Reserved.